Гост исо 10816-1-97. вибрация. контроль состояния машин по результатам измерений на невращающихся частях. часть 1. общие требования
Содержание:
4.2 Точки измерения
Измерения
следует проводить на подшипниках, корпусах подшипников или других элементах
конструкции, которые в максимальной степени реагируют на динамические силы и
характеризуют общее вибрационное состояние машины. Типичные примеры
расположения точек измерения приведены на рисунках 1а — 1д.
|
|
|
|
Рисунок la — Точки измерения на опоре подшипника |
Рисунок 16 — |
|
Рисунок 1в — |
|
|
Рисунок 1г — |
Рисунок 1д — |
Полную оценку
вибрационного состояния крупных агрегатов дают результаты измерений в
контролируемых точках в трех взаимно перпендикулярных направлениях, как указано
на рисунках 1а — 1д. Как правило, подобная полнота измерений требуется только
для приемочных испытаний. При эксплуатационном контроле обычно выполняют одно
или два измерения в радиальном направлении . Кроме того, дополнительно можно также проводить измерения осевой
вибрации, обычно в месте расположения упорного подшипника.
Расположение точек
измерения для машин конкретных типов должно быть приведено в соответствующих
стандартах на машины этих типов.
4.4 Требования к опорам машины при приемочных испытаниях
4.4.1 На месте эксплуатации
Если приемочные испытания проводят на месте эксплуатации,
роторы должны быть установлены на штатные опоры
В этом случае важно, чтобы при
проведении приемочных испытаний были смонтированы все основные элементы машины;
для головных образцов машин это требование является обязательным, а для
серийных машин, если это невозможно, оценочные критерии должны быть
соответствующим образом корректированы. Результаты сравнения вибрационного
состояния однотипных машин, установленных на различных фундаментах, сопоставимы
лишь при условии сходства динамических характеристик фундаментов
4.4.2 На испытательном стенде
Необходимо создать условия, при которых исключается
совпадение частот собственных колебаний испытательной установки с частотой вращения
машины или с какой-либо из ее мощных гармоник. Обычно полагают, что данное
требование выполняется, если значение горизонтальной и вертикальной вибрации
несущих элементов фундамента вблизи опор подшипников не превышает 50 % значения
вибрации соответствующего подшипника в том же направлении. Испытательная
установка не должна вызывать также изменений значения какой-либо из основных
собственных частот машины в эксплуатации. Если резонансы опоры устранить не
удается, следует проводить приемочные испытания полностью собранной машины на
месте эксплуатации.
Приемочные испытания машин некоторых классов, например
небольших электрических машин, проводят на упругом основании. В этом случае
низшие собственные частоты системы машина — испытательные опоры, рассматриваемой
как жесткое тело, должны быть менее 1/2 минимальной
частоты возбуждения. Соответствующие условия опирания могут быть достигнуты
путем установки машины на упругоопирающийся фундамент (основание) или с помощью
свободной подвески на мягких пружинах.
4 Классификация машин
Оценку вибрационного состояния проводят в зависимости от следующих факторов:
-
— вида машины;
-
— номинальной мощности или высоты оси вращения вада;
-
— жесткости опорной системы.
4.1 Классификация по виду машины, номинальной мощности или высоте оси вращения вала
Установлены четыре группы машин в зависимости от конструкции машин, типов подшипников и опорных конструкций. Валы машин могут быть расположены горизонтально, вертикально или наклонно, а опоры могут иметь разную степень жесткости.
Группа 1 — машины номинальной мощностью более 300 кВт; электрические машины с высотой оси вращения вала выше 315 мм.
Как правило, такие машины оснащены подшипниками скольжения. Диапазон их рабочих скоростей достаточно широк — от 120 до 15000 мин~’.
Группа 2 — машины номинальной мощностью от 15 до 300 кВт; электрические машины с высотой оси вращения вала от 160 до 315 мм.
Как правило, такие машины оснащены подшипниками качения; рабочая скорость — более 600 мин1.
Группа 3 — насосы центробежного типа, со смешанными или осевыми потоками с раздельным приводом и номинальной мощностью более 15 кВт.
Такие машины могут быть оснащены как подшипниками качения, так и подшипниками скольжения.
Группа 4 — насосы центробежного типа, со смешанными или осевыми потоками с встроенным приводом и номинальной мощностью более 15 кВт.
Такие машины могут быть оснащены как подшипниками качения, так и подшипниками скольжения.
Примечания
-
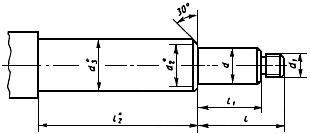
1 Высота оси вращения вала Н — расстояние, измеренное между осью вращения вала и плоскостью основания машины, готовой к поставке (рисунок I).
-
2 Для машины без опоры или с поднятой опорой или для вертикально установленной машины высоту оси вращения вала определяют так, как если бы машина тех же размеров была установлена горизонтально на обычных опорах. Если такое определение размеров невозможно, за значение высоты оси вращения вала берут половину диаметра машины.
4.2 Классификация по жесткости опоры
Опоры машин по их жесткости в направлении измерения вибрации разделяют на:
-
— жесткие опоры;
-
— податливые опоры.
Такое разграничение вытекает из соотношения между жесткостью машины и фундамента. Если первая собственная частота системы «опора — машина» в направлении измерений превышает основную частоту возбуждения (в большинстве случаев — частоту вращения ротора), по крайней мере, на 25 %, такую опору считают жесткой в данном направлении. Все остальные опоры считают податливыми.
Машинами с жесткими опорами обычно являются крупно- и среднегабаритные электромоторы, как правило, с низкой частотой вращения. Машинами с податливыми опорами обычно являются турбогенераторы или компрессоры мощностью более 10 МВт, а также вертикально установленные машины.
В ряде случаев опора будет жесткой в одном направлении и податливой в другом. Например, первая собственная частота в вертикальном направлении может быть существенно выше основной частоты возбуждения, в то время как собственная частота в горизонтальном направлении может быть значительно меньше. Такую конструкцию считают жесткой в вертикальном направлении и податливой в горизонтальном. При этом вибрационное состояние такой машины следует оценивать согласно классификации применительно к заданному направлению измерений.
Если характеристики системы «опора — машина» не могут быть определены расчетным методом, это можно сделать экспериментальным путем.
6.3 Критерий 2
Данный критерий основан
на оценке изменения значения параметра вибрации по сравнению с предварительно
установленным эталонным значением в установившемся режиме работы машины.
Значительные изменения (увеличение или уменьшение) значения параметра
широкополосной вибрации могут потребовать принятия определенных мер даже в том
случае, когда граница зоны С в
соответствии с критерием 1 еще не достигнута. Такие изменения могут иметь
внезапный характер или постепенно нарастать во времени и указывают на возможное
возникновение повреждения машины в начальной стадии или другие неполадки.
При использовании
критерия 2 важно, чтобы измерения значений параметров вибрации, подлежащие
впоследствии сравнению, проводили при одних и тех же положении и ориентации
преобразователя вибрации и приблизительно в одном и том же режиме работы
машины. Необходимо определить очевидные изменения значения параметра вибрации
независимо от его общего значения, чтобы предотвратить возникновение опасной
ситуации
Насколько данное изменение является значительным, должно быть
определено в соответствующих стандартах на машины конкретных типов.
Следует иметь в виду, что
некоторые существенные изменения в состоянии машины могут быть обнаружены
только при контроле отдельных спектральных составляющих (см. ).
Приложение А(обязательное) Границы зон состояния
В качестве основного вибрационного параметра для оценки вибрационного состояния машин применяют общее среднее квадратическое значение виброскорости.
В ряде случаев измерения проводят с помощью приборов, откалиброванных для считывания не средних квадратических, а пиковых значений виброскорости. Если сигнал вибрации имеет форму, близкую к синусоиде, можно установить простое соответствие между пиковым и средним квадратическим значениями. Границы зон, указанные в таблицах — , преобразуют в пиковые значения, умножая их на коэффициент . И наоборот, измеренное пиковое значение можно преобразовать в среднее квадратическое, разделив его на .
Для многих машин вибрация сосредоточена, в основном, на оборотной частоте, а для насосов иногда на лопастной частоте. В случаях, когда вместо средних квадратических измеряют пиковые значения вибрации, могут быть построены таблицы, аналогичные таблицам — . Для этого значения границ зон должны быть умножены на коэффициент . После этого таблицы могут быть использованы для оценки вибрационного состояния по измерениям пиковых значений при условии, что в спектре вибрации доминирует одна частотная составляющая.
Установлено, что использование критерия, основанного только на измерении виброскорости без учета частоты вибрации, может приводить к неприемлемо большим значениям виброперемещения. Это, в частности, справедливо для машин с низкой рабочей скоростью, для которых составляющая на оборотной частоте является доминирующей. Аналогично использование критериев, основанных на измерениях виброскорости, в случае высоких рабочих скоростей или концентрации вибрационной энергии в высокочастотной области диапазона может привести к неприемлемо высоким значениям виброускорения. В идеале критерии должны быть представлены в виде постоянных значений виброперемещения, виброскорости и виброускорения в зависимости от диапазона скоростей и типа машины. Однако в настоящее время границы зон состояния построены только для виброскорости и виброперемещения. Границы зон состояния для четырех групп машин, на которые распространяется настоящий стандарт, приведены в таблицах А.1 — А.4.
Границы определены для средних квадратических значений скорости или перемещения широкополосной вибрации в диапазоне частот от 10 до 1000 Гц (для машин со скоростью ниже 600 мин-1- от 2 до 1000 Гц). Границы зон вибрационного состояния, контролируемые параметры и места измерения вибрации в диапазоне частот выше 1000 Гц должны быть установлены по соглашению между изготовителем и потребителем машины. В большинстве случаев достаточно измерять только виброскорость. Если предполагают, что в спектре вибрации велика доля низкочастотных составляющих, оценку проводят на основе измерений как виброскорости, так и виброперемещения.
В таблицах А.1 — А.4 приведены разные значения границ зон для жестких и податливых фундаментов (см. ).
|
Класс опоры |
Граница зон |
С.К.З. перемещения, мкм |
С.К.З. скорости, мм/с |
|
Жесткие |
А/В |
29 |
2,3 |
|
В/С |
57 |
4,5 |
|
|
CD |
90 |
7,1 |
|
|
Податливые |
А/В |
45 |
3,5 |
|
В/С |
90 |
7,1 |
|
|
CD |
140 |
11,0 |
|
Класс опоры |
Граница зон |
С.К.З. перемещения, мкм |
С.К.З. скорости, мм/с |
|
Жесткие |
А/В |
22 |
1,4 |
|
В/С |
45 |
2,8 |
|
|
CD |
71 |
4,5 |
|
|
Податливые |
А/В |
37 |
2,3 |
|
В/С |
71 |
4,5 |
|
|
CD |
113 |
7,1 |
|
Класс опоры |
Граница зон |
С.К.З. перемещения, мкм |
С.К.З. скорости, мм/с |
|
Жесткие |
А/В |
18 |
2,3 |
|
В/С |
36 |
4,5 |
|
|
CD |
56 |
7,1 |
|
|
Податливые |
А/В |
28 |
3,5 |
|
В/С |
56 |
7,1 |
|
|
CD |
90 |
11,0 |
|
Класс опоры |
Граница зон |
С.К.З. перемещения, мкм |
С.К.З. скорости, мм/с |
|
Жесткие |
А/В |
11 |
1,4 |
|
В/С |
22 |
2,8 |
|
|
CD |
36 |
4,5 |
|
|
Податливые |
А/В |
18 |
2,3 |
|
В/С |
36 |
4,5 |
|
|
CD |
56 |
7,1 |
Примечания к таблицам А.1 — А.4
1 Указанные значения применяют при измерениях радиальной вибрации всех подшипников и подшипниковых опор или на корпусе машины, а также при измерениях осевой вибрации подшипников в установившемся режиме работы с номинальной скоростью или в заданном диапазоне скоростей. Их не применяют при работе машины в переходном режиме (т.е. с изменяющейся скоростью или нагрузкой).
2 Для конкретных машин и опор, а также в конкретных режимах работы допускаются другие значения. Применение других значений должно быть установлено по соглашению между изготовителем и потребителем.
3 Насосы с крыльчаткой специального вида, используемые для очистных и других подобных работ, могут иметь более высокую вибрацию (например, для однолопастной крыльчатки — до 3 мм/с).
3 Измерения вибрации
Измерения вибрации — по ГОСТ ИСО 10816-1 с учетом требований 3.1-3.4.
3.1 Средства измеренийИзмерительная аппаратура должна обеспечивать проведение измерений в широкой полосе частот среднеквадратических значений параметров вибрации (виброскорости или виброперемещения — в зависимости от используемого критерия согласно ГОСТ ИСО 10816-1) и иметь линейную характеристику в диапазоне от 10 до 1000 Гц согласно требованиям ГОСТ ИСО 2954. Однако для машин, скорость которых менее 600 мин, нижняя граница диапазона частот измерений не должна превышать 2 Гц.Примечание — Если измерительное оборудование предназначено также для использования в целях диагностики, верхняя граница диапазона частот измерений может быть более 1000 Гц.Дополнительная погрешность не должна превышать значений, указанных в ГОСТ ИСО 2954
В качестве влияющих факторов следует рассматривать:- колебания температуры;- магнитные поля;- звуковые поля;- колебания напряжения питания;- длину преобразовательного кабеля;- ориентацию датчика.Особое внимание следует уделять правильной установке датчика и исключению влияния его крепления на точность измерений. Требования к креплению датчика вибрации — по ГОСТ ИСО 5348
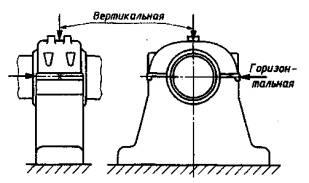
3.2 Точки измеренийИзмерения проводят на выступающих частях машин, доступ к которым свободен. Следует убедиться, что результаты измерений соответствуют истинной вибрации подшипника и не искажены влиянием локальных резонансов. Точки и направления измерений следует выбирать таким образом, чтобы измеряемая вибрация несла в себе достаточную информацию о динамических силах, действующих в машине.Измерения необходимо проводить в двух ортогональных радиальных направлениях на крышке или опоре каждого подшипника как показано на рисунках 1 и 2. Направление измерений вибрации подшипника допускается выбирать произвольно, но обычно для горизонтально установленной машины предпочтительны горизонтальное и вертикальное направления. Для машины, установленной вертикально или под углом, в качестве одного из направлений следует использовать то, для которого характерна максимальная вибрация. В некоторых случаях целесообразно измерять также вибрацию в осевом направлении (5.1.3). В протоколе измерений следует указывать местоположения датчиков и направления измерений вибрации.
Рисунок 1 — Расположение точек измерений
Рисунок 2 — Точки измерений для вертикально установленной машины
Рисунок 2 — Точки измерений для вертикально установленной машины
Допускается проводить измерения не в двух, а только в одном направлении с использованием одного датчика при условии, что это позволит получать достаточно полную информацию о вибрации подшипника. Однако следует учитывать, что выбранная ориентация единственного датчика может не обеспечивать получение максимального значения вибрации данного подшипника.
3.3 Непрерывный и периодический контрольПри эксплуатации машин, повреждения которых могут вызвать тяжелые последствия, используют встроенное оборудование для непрерывного контроля уровня вибрации в ключевых точках. Но для многих машин небольшого размера и малой мощности проведение непрерывного контроля будет излишним. Изменения дисбаланса, характеристик подшипника, несоосность и другие дефекты с достаточной степенью надежности могут быть обнаружены при периодическом контроле с помощью постоянно установленной или переносной аппаратуры. Для отслеживания изменений в состоянии и извещении о неисправности могут быть использованы автоматизированные системы.
3.4 Режимы работыИзмерения проводят в нормальном режиме работы, определяемом, например, частотой вращения, напряжением питания, скоростью потока, давлением и нагрузкой после достижения ротором и подшипниками машины рабочей температуры.В случае работы на переменных скоростях или с разными нагрузками измерения проводят для всех режимов, при которых машина работает продолжительное время. Для оценки степени виброактивности машины берут максимальное значение вибрации по всем режимам, в которых проводились измерения.Если измеренная вибрация превышает допустимую, но при этом возможно, что большой вклад в вибрацию вносят внешние источники, измерения следует проводить на неработающей машине, чтобы оценить степень влияния сторонних источников. Если вибрация неработающей машины превышает 25% вибрации машины в процессе ее работы, следует осуществить коррекцию результатов измерений для уменьшения влияния наведенной вибрации.Примечание — В некоторых случаях влияние вибрации внешних источников можно исключить с помощью спектрального анализа или отключением внешних источников.
Предисловие
Цели, основные принципы и основной порядок проведения работ по межгосударственной стандартизации установлены ГОСТ 1.0-92 «Межгосударственная система стандартизации. Основные положения» и ГОСТ 1.2-97 «Межгосударственная система стандартизации. Стандарты межгосударственные, правила и рекомендации по межгосударственной стандартизации. Порядок разработки, принятия, применения, обновления и отмены»
Сведения о стандарте
1 ПОДГОТОВЛЕН Открытым акционерным обществом «Научно-исследовательский центр контроля и диагностики технических систем» на основе собственного аутентичного перевода стандарта, указанного в пункте 4
2 ВНЕСЕН Госстандартом России
3 ПРИНЯТ Межгосударственным советом по стандартизации, метрологии и сертификации (протокол № 21 от 30 мая 2002 г.)
За принятие проголосовали:
|
Краткое наименование страны по MK(ИСО 3166) 004-97 |
Код страны по MK(ИСО 3166) 004-97 |
Сокращенное наименование национального органа по стандартизации |
|
Азербайджан |
AZ |
Азгосстандарт |
|
Армения |
AM |
Армгосстандарт |
|
BY |
Госстандарт Республики Беларусь |
|
|
Казахстан |
KZ |
Госстандарт Республики Казахстан |
|
Кыргызстан |
KG |
Кыргызстандарт |
|
Молдова |
MD |
Молдова-Стандарт |
|
Российская Федерация |
RU |
Госстандарт России |
|
Таджикистан |
TJ |
Таджикстандарт |
|
Туркменистан |
TM |
Главгосслужба «Туркменстандартлары» |
|
Узбекистан |
UZ |
Узстандарт |
|
Украина |
UA |
Госстандарт Украины |
4 Настоящий стандарт идентичен международному стандарту ИСО 10816-3:1998 «Вибрация. Оценка состояния машин по результатам измерений вибрации на невращающихся частях. Часть 3. Промышленныемашиныноминальноймощностьюболее 15 кВтиноминальнойскоростьюот 120 до 15000 обминнаместеэксплуатации» (ISO 10816-3:1998 «Mechanical vibration — Evaluation of machine vibration by measurements on non-rotating parts — Part 3: Industrial machines with nominal power above 15 kW and nominal speeds between 120 r/min and 15000 r/min when measured in situ»).
Степень соответствия — идентичная (IDT).
Настоящий стандарт идентичен ГОСТ Р ИСО 10816-3-99
5 Приказом Федерального агентства по техническому регулированию и метрологии от 24 апреля 2007 г. № 78-ст межгосударственный стандарт ГОСТ ИСО 10816-3-2002 введен в действие в качестве национального стандарта Российской Федерации с 1 ноября 2007 г.
6 ВВЕДЕН ВПЕРВЫЕ
Информация о введении в действие (прекращении действия) настоящего стандарта публикуется в указателе «Национальные стандарты».
Информация об изменениях к настоящему стандарту публикуется в указателе «Национальные стандарты», а текст изменений — в информационных указателях «Национальные стандарты», В случае пересмотра или отмены настоящего стандарта соответствующая информация будет опубликована в информационном указателе «Национальные стандарты»